
 EU
EU 





Kontrolmodul med Integreret Driver til Steppermotor – Ydeevne og Præcision i Industriel Automatisering
Dette kontrolmodul med integreret driver er specielt designet til enkeltaksede steppermotorer og tilbyder en komplet løsning til industriel automatisering, CNC-kontrol, robotik og mekaniske pakkesystemer. Det kan fungere selvstændigt eller i kombination med andre systemer uden behov for Arduino eller Python, hvilket gør det ideelt til industrielle kontrolapplikationer og præcis positionering af steppermotorer.
Hovedfunktioner
- Integreret Controller og Driver: Styrer steppermotoren og overvåger driftsstatus i realtid.
- Rotation Frem og Tilbage: Skift rotationsretning via knap eller potentiometer, automatisk afhængigt af driftsmode.
- 3 Styringsmodi: Forudindstillet mode, ekstern knapkontrol eller ekstra drivere.
- 9 Arbejdsprogrammer: Programmer til forskellige applikationer: Frem/Tilbage, Forsinkelse, Loops, Automatisk stop, Rotationshastighed m.m.
- HD LCD-skærm: Viser hastighed, cyklusantal og kontrolparametre med hukommelsesfunktion og høj præcision.
Tekniske parametre
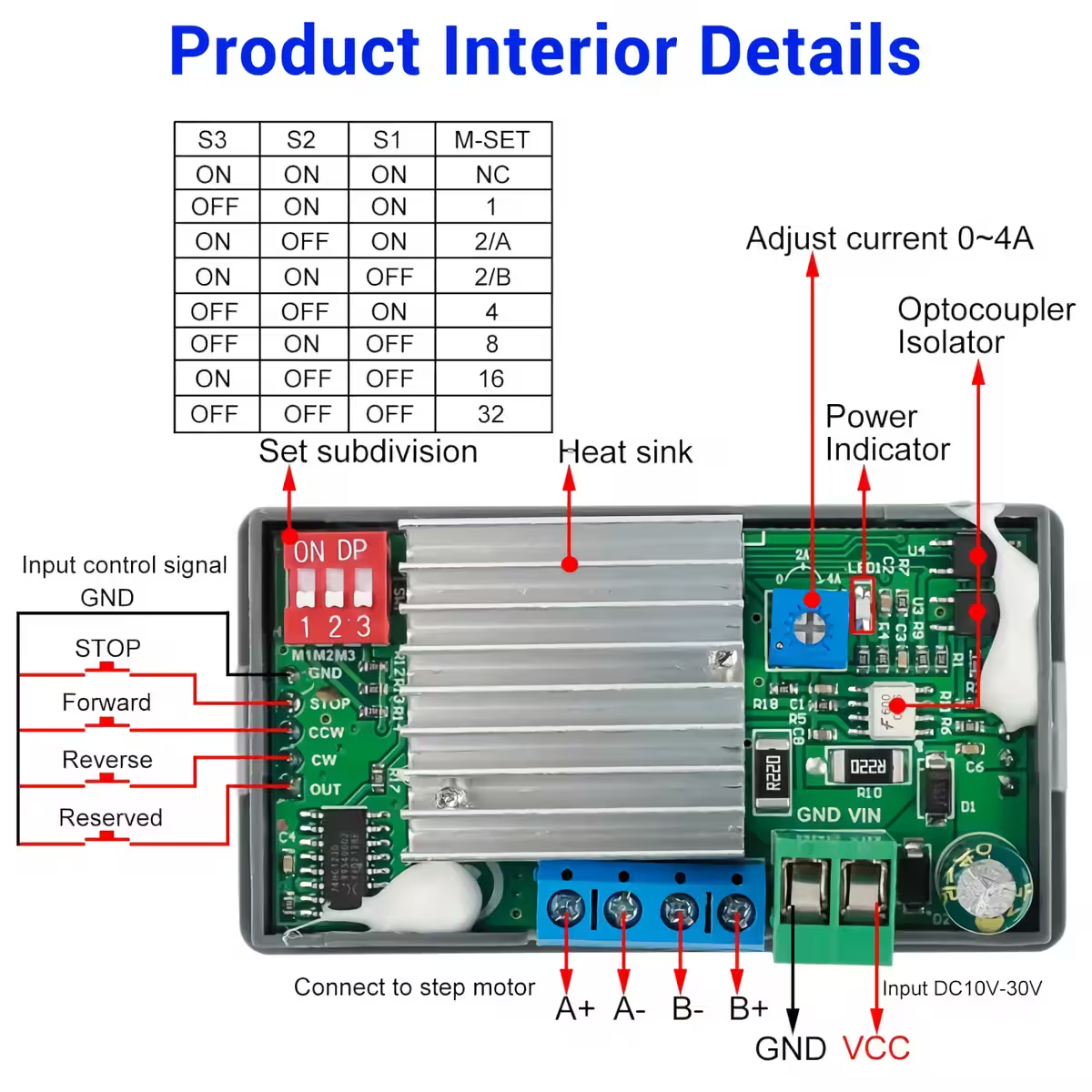
- Indgangsspænding: DC 5V-30V
- Udgangsstrøm/driver: 4A (maks.)
- Kontrolaksler: Enkelt akse
- Kompatibel motor: Stepper 42/57 (Nema17 / Nema23)
- Kontrolhastighed: 0,1-999 RPM
- Frem/tilbage pulser: 1-9.999.999
- Antal cyklusser: 1-9.999 eller uendelig loop
- Frem/tilbage forsinkelse: 0,0-999,9 sekunder
- Subdivision: 1/2/4/8/16/32
- Acceleration/deceleration kontrol: Ja
- Indgangspolaritetsbeskyttelse: Ja
- Styringsmodi: Automatisk/Manuel/Setup
- Driftstemperatur: -20°C til 85°C
- Driftsfugtighed: 5% til 95% RH
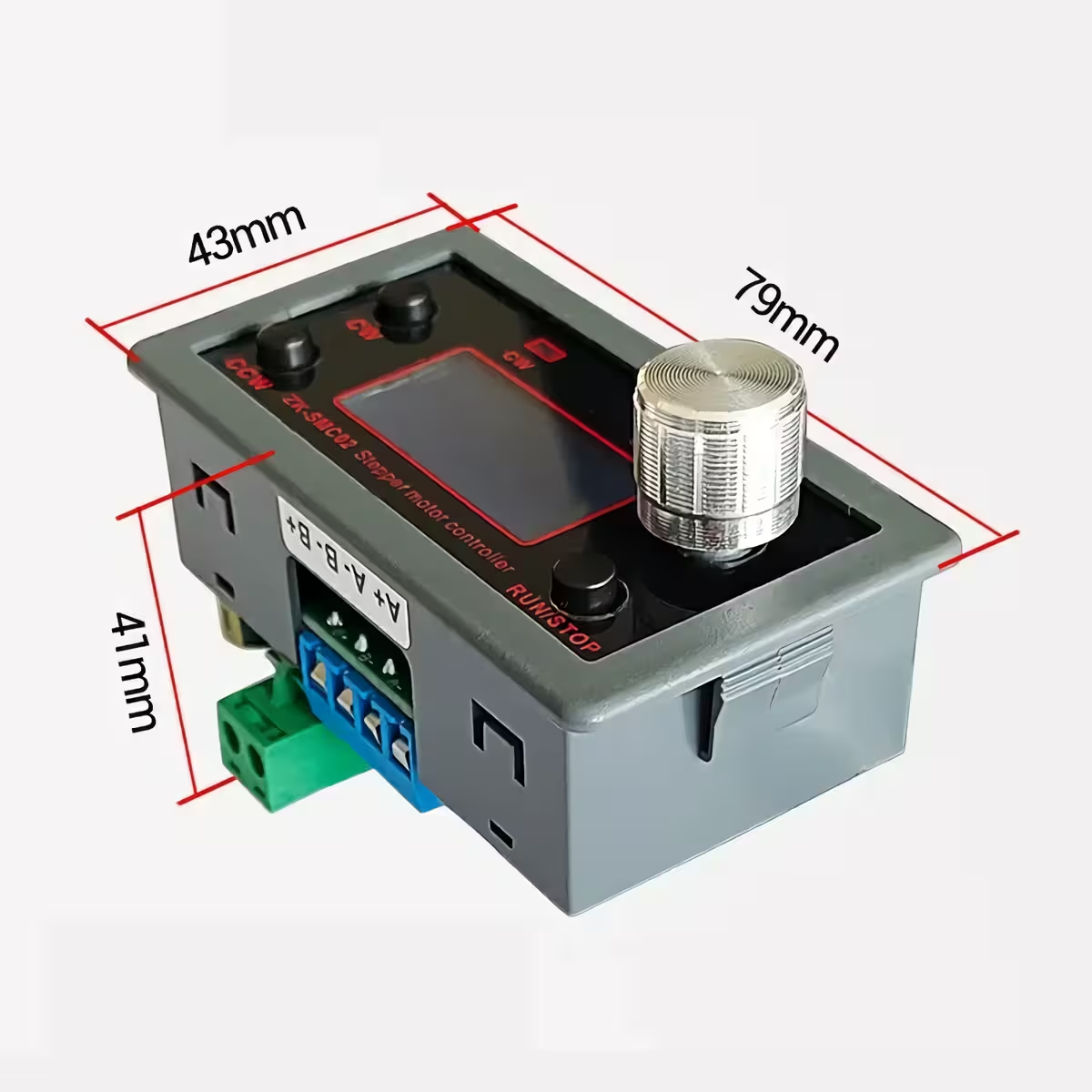
- Modulstørrelse: 79 x 43 x 41 mm
Konfigurationsmetoder
1. Kørselsinterface
- Første linje viser rotationshastighed i RPM.
- Anden linje viser forsinkelsestid eller cyklusantal, kan indstilles via F-10 menuen.
- CW-knap: rotation fremad.
- CCW-knap: rotation tilbage.
- RUN/STOP-knap: start/stop.
- Potentiometer: justering af hastighed i begge retninger.
- Hold potentiometer >3 sekunder: indtast parameteropsætningsmode.
2. Parameterinterface
- Rotering af potentiometer vælger parameter F-01~F-13.
- Valgt parameter blinker.
- Tryk på potentiometer for at vælge værdi.
- Ændring af værdier via potentiometerrotation eller bitvalg.
- RUN/STOP-knap bekræfter parametre.
- Gem og afslut opsætningsmode efter >3 sekunder.
3. Hjælpefunktion
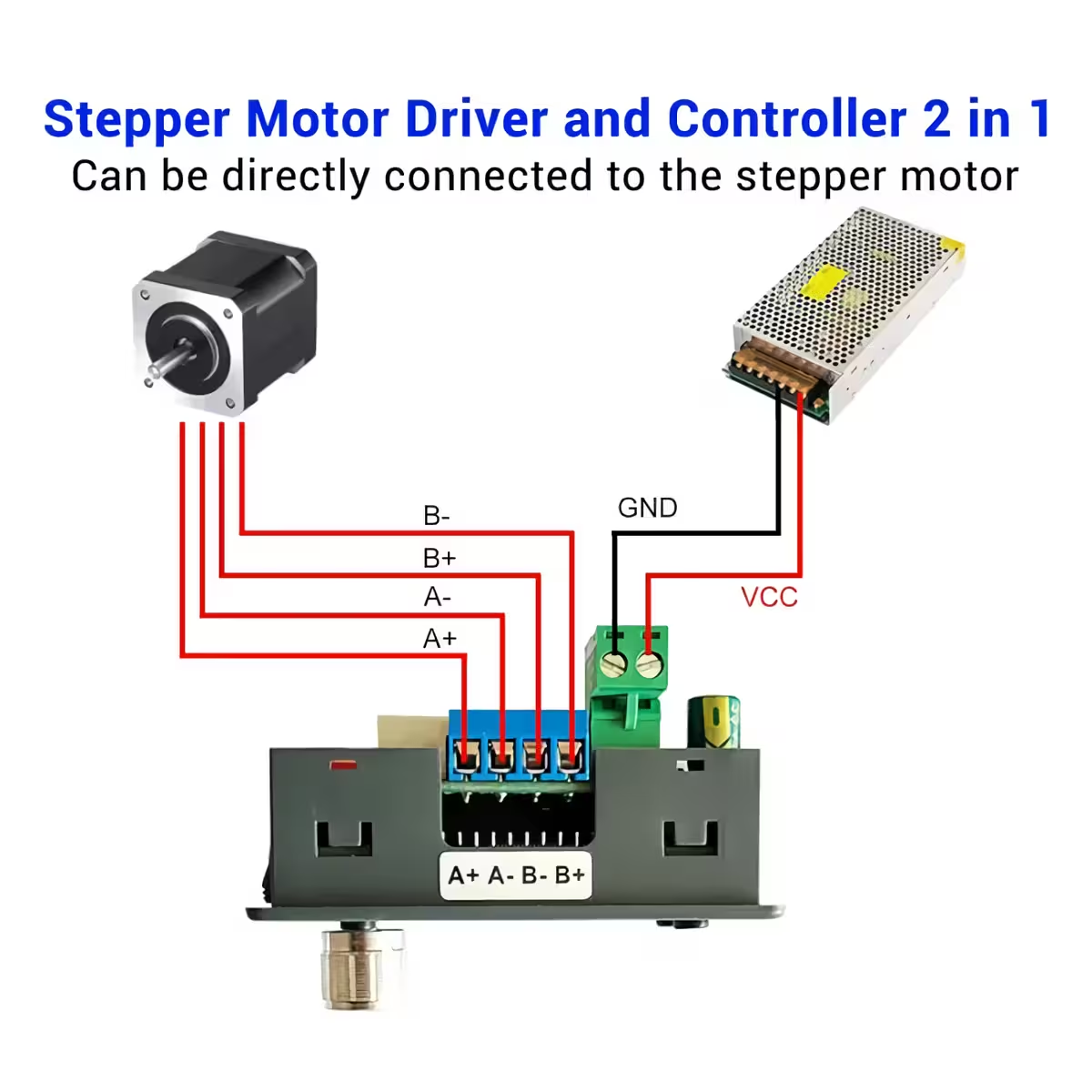
- Selvstændig drift ved blot at tilslutte strøm og motor.
- Mulighed for at tilslutte eksterne knapper til ekstra kontrol.
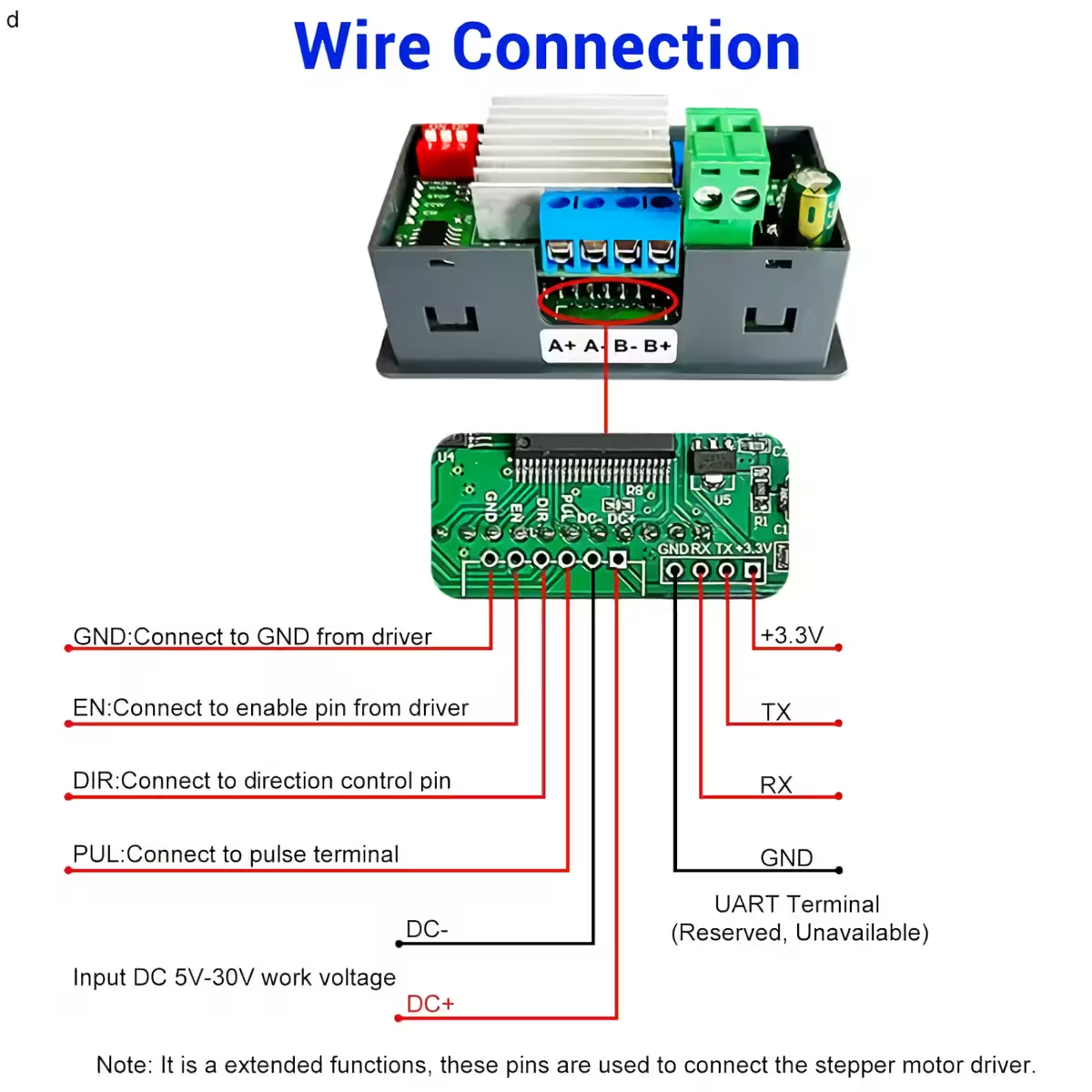
- Kompatibel med andre stepper drivere – Auto/Manual/Setup mode.
4. Driftsmode
- Automatisk kontrol: kører med indstillede parametre.
- Manuel kontrol: kræver tilslutning af knapper til terminalerne COM/STOP/CCW/CW.
- Setup mode: tilslutning til andre stepper drivere.
Vigtige noter
- Kompatibel med 2-fasede steppermotorer uanset antal ledninger (4, 5, 6 eller 8).
- Indeholder integrerede drivere og controllere, men kan også tilsluttes eksterne drivere.
Anvendelser
- Industriel automatiseret kontrol
- CNC-maskiner
- Mekanisk pakning
- Elektronisk bearbejdning og test
- Automatiske samlelinjer
- Robotik og procesautomatisering
- Positionerings- og bevægelsessystemer
| Parameter | Funktion | Indstillingsområde | Standardværdi |
|---|---|---|---|
| F-01 → ? | Vælg driftsmode. Se næste tabel. | P01~P09 | P01 |
| F-02 | Frempulser. Skift High/Low bit via potentiometer: High 3Bit: Hxxx, Low 4Bit: xxxx | 1~9999999 | 1600 |
| F-03 | Frem rotationshastighed i RPM | 0.1~999.9 | 10 |
| F-04 | Tilbage pulser. Skift High/Low bit via potentiometer: High 3Bit: Hxxx, Low 4Bit: xxxx | 1~9999999 | 1600 |
| F-05 | Tilbage rotationshastighed i RPM | 0.1~999.9 | 10 |
| F-06 | Antal arbejdscyklusser (‘–-’ betyder uendelig loop) | 0~9999 eller uendelig loop | 1 |
| F-07 | Frem forskydelsesforsinkelse i sekunder ±0,2s | 0.0~999.9 | 0 |
| F-08 | Tilbage forskydelsesforsinkelse i sekunder ±0,2s | 0.0~999.9 | 0 |
| F-09 | Pulser pr. rotation. Enhed 10. F.eks. 1,8° step og subdivision 8 → 360/1.8*8=1600 → værdi 160. | 1~9999 | 160 |
| F-10 | Indstil LCD-visning: 0: Første linje RPM, anden linje forsinkelse. 1: Første linje RPM, anden linje cyklusantal. | 0 eller 1 | 0 |
| F-11 | Motorstatus efter RUN/STOP: 0: langsom stop, 1: stop med det samme. | 0 eller 1 | 0 |
| F-12 | Acceleration/deceleration niveau: 001 langsomst, 100 hurtigst. | 001~100 | 20 |
| F-13 | Enhedsadresse | 001~255 | 1 |
| Driftsmode | Arbejdsgang |
|---|---|
| F-01 → P01 |
1. Motoren styres via potentiometer. Andre knapper er inaktive. 2. Motoren roterer fremad, CW-indikator tændes når potentiometer drejes med uret. 3. Motoren roterer tilbage, CCW-indikator tændes når potentiometer drejes mod uret. |
| F-01 → P02 |
1. Motoren roterer efter pulser sat i F-02 og F-04. 2. Stop efter hvert pulssæt, reset via potentiometer. 3. Loop gentages ifølge cyklusantal i F-06. |
| F-01 → P03 |
1. Motoren kører frem og tilbage efter definerede pulser. 2. Retning frem/tilbage defineres via F-02/F-04. 3. Hastighed reset via potentiometer. 4. Bemærk: Stop motor før retning ændres. |
| F-01 → P04 |
1. Motoren kører F-02/F-04 og stopper, loop gentages F-06 gange. 2. Frem: F-02 → stop F-07 → loop. 3. Tilbage: F-04 → stop F-08 → loop. 4. RPM reset via potentiometer. 5. Bemærk: Stop motor før retning ændres. |
| F-01 → P05 |
1. Motor kører F-02/F-04, vender tilbage, loop F-06 gange. 2. Frem: F-02 → stop F-07 → loop → tilbage. 3. Tilbage: F-04 → stop F-08 → loop → tilbage. 4. RPM reset via potentiometer. 5. Bemærk: Stop motor før retning ændres. |
| F-01 → P06 |
1. Motor kører F-02/F-04, skifter retning, loop F-06 gange. 2. Frem: F-02 → stop F-07 → F-04 → stop F-08 → loop. 3. Tilbage: F-04 → stop F-08 → F-02 → stop F-07 → loop. 4. RPM reset via potentiometer. 5. Bemærk: Stop motor før retning ændres. |
| F-01 → P07 |
1. Motor kører efter pulser og vender tilbage. 2. Frem: F-02 → stop F-07 → tilbage. 3. Tilbage: F-04 → stop F-08 → tilbage. 4. RPM reset via potentiometer. |
| F-01 → P08 |
1. Motor kører efter forsinkelse F-07/F-08, stopper, loop F-06 gange. 2. Frem: F-07 → stop F-08 → loop. 3. Tilbage: F-08 → stop F-07 → loop. 4. RPM reset via potentiometer. 5. Bemærk: Stop motor før retning ændres. |
| F-01 → P09 |
1. Motor kører frem F-02, stopper F-07, tilbage F-04, stopper F-08, loop F-06 gange. 2. RPM reset via potentiometer. 3. Bemærk: Stop motor før retning ændres. |












Recenzii
Nu există recenzii până acum.