



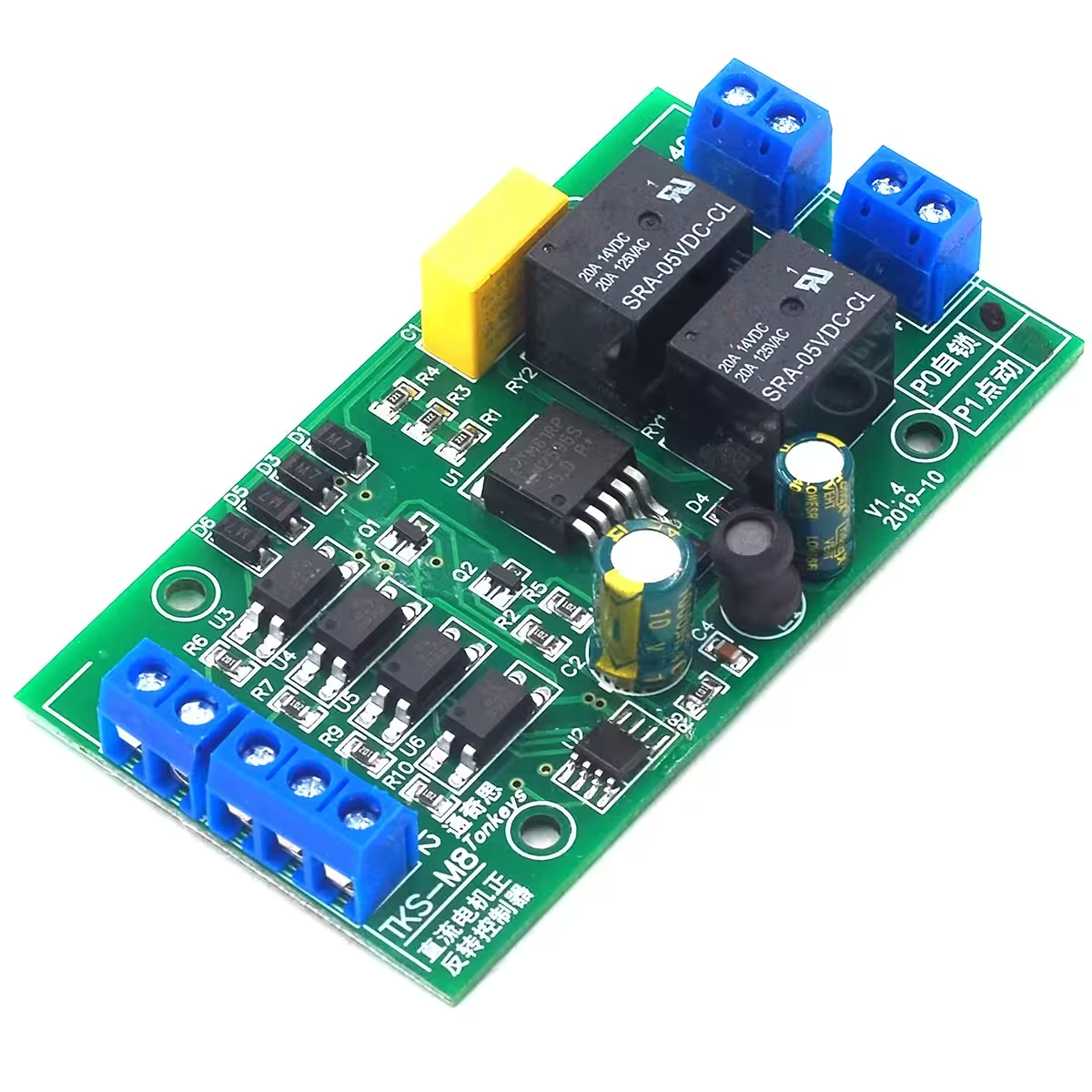
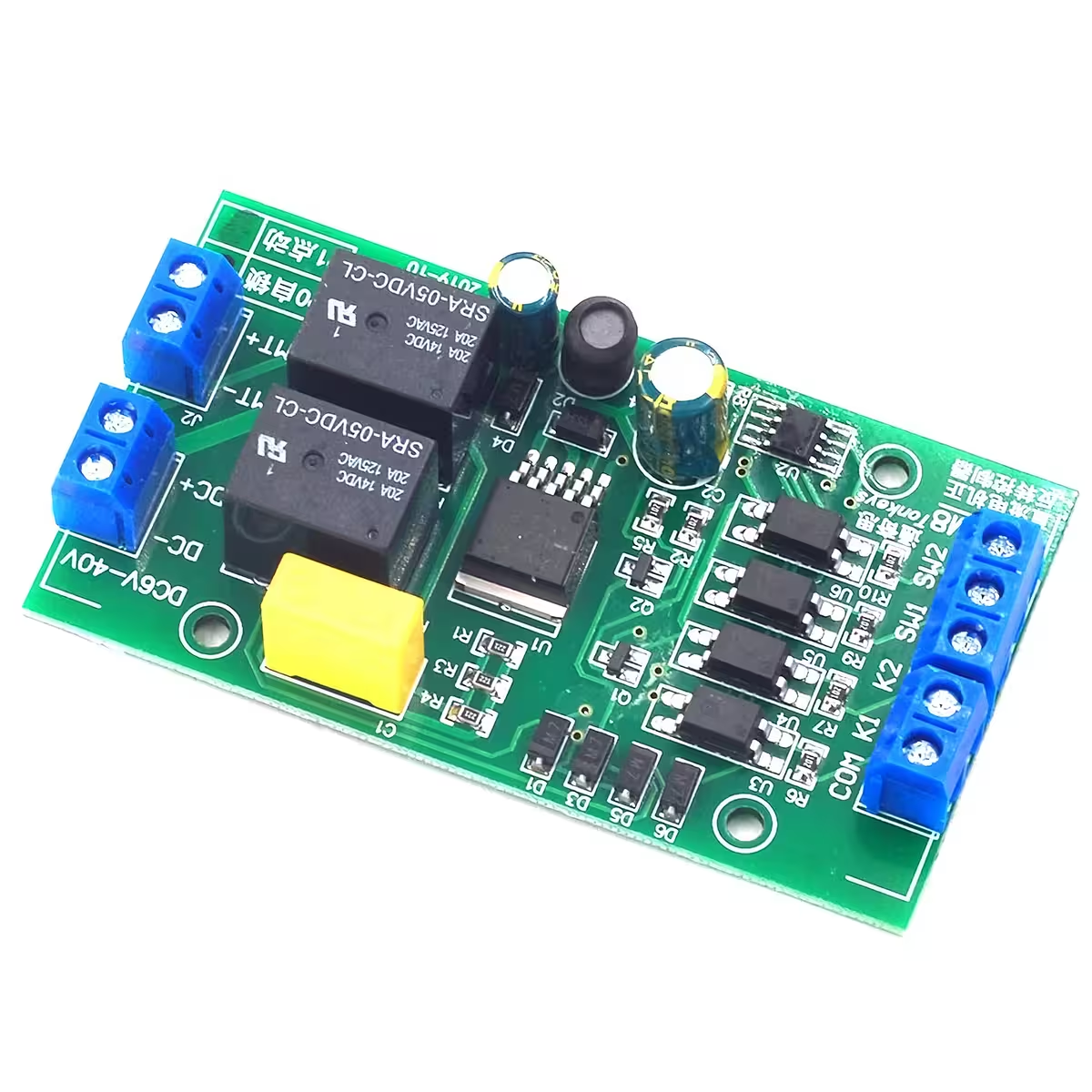
DC motorstyring – præcis frem/bak-kontrol uden eksterne komponenter
Står du med et lineært aktuator-projekt, en reversibel mekanisme eller et DIY-setup, der kræver præcis styring af retningen? Uden et dedikeret modul ender man ofte med komplekse løsninger med relæer, transistorer og et virvar af ledninger. Denne DC motorstyring løser opgaven i ét kompakt modul: Tilslut strømforsyning, motor og knapper – så er du kørende på få minutter.
Bemærk: Motoren modtager den samme spænding, som strømforsyningen leverer. Spændingen kan ikke justeres via denne controller.
Hvorfor vælge denne model? (Fordele):
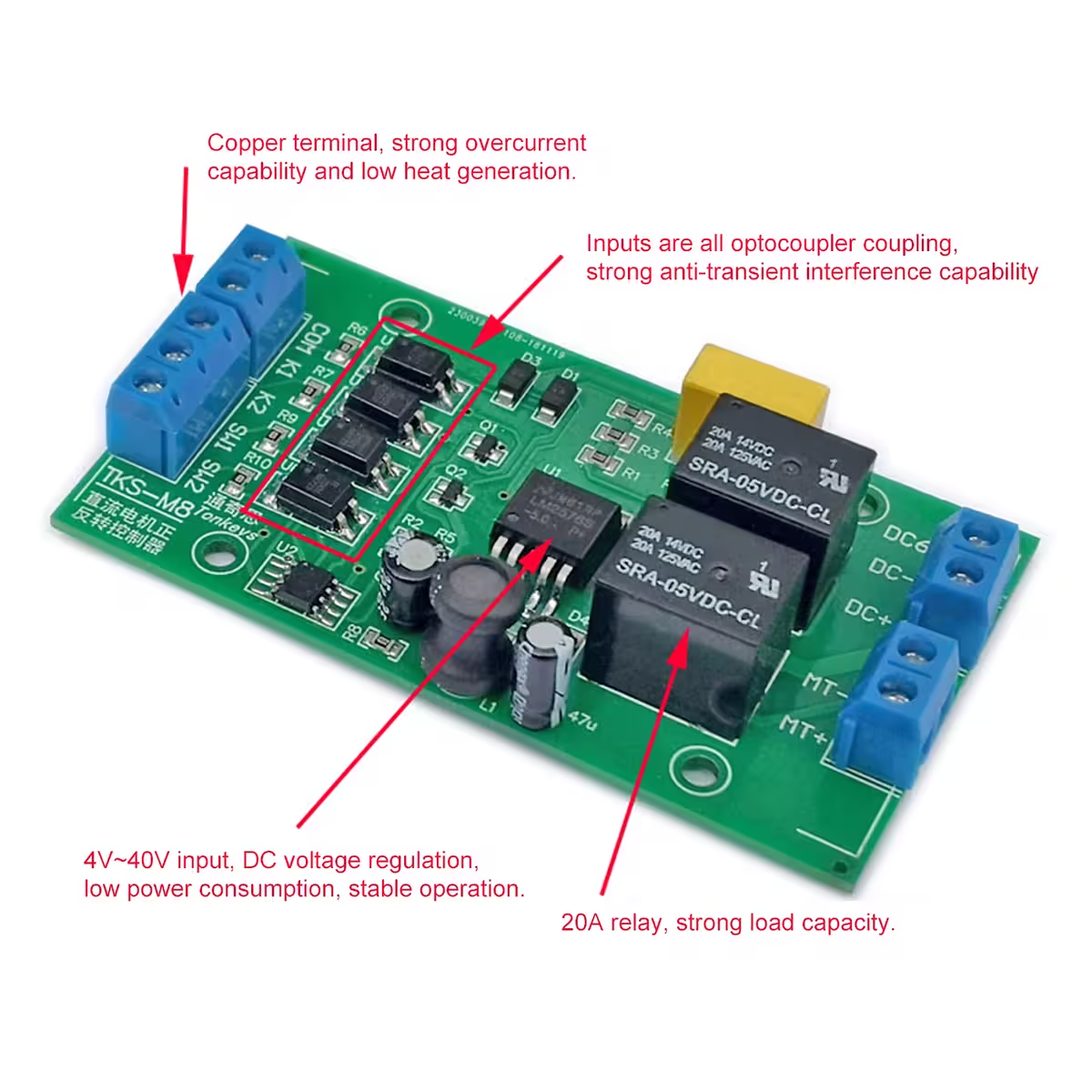
- Bredt spændingsområde: 4–40V DC — fungerer med alt fra LiPo-batterier til laboratoriestrømforsyninger uden behov for modifikationer.
- Høj belastningsevne op til 20A — håndterer motorer med høje startstrømme, velegnet til belastninger op til ca. 80W.
- To driftstilstande: PO og P1 — vælg mellem selvholdende drift (start ved kort impuls) eller jog-funktion (kører kun mens knappen holdes nede).
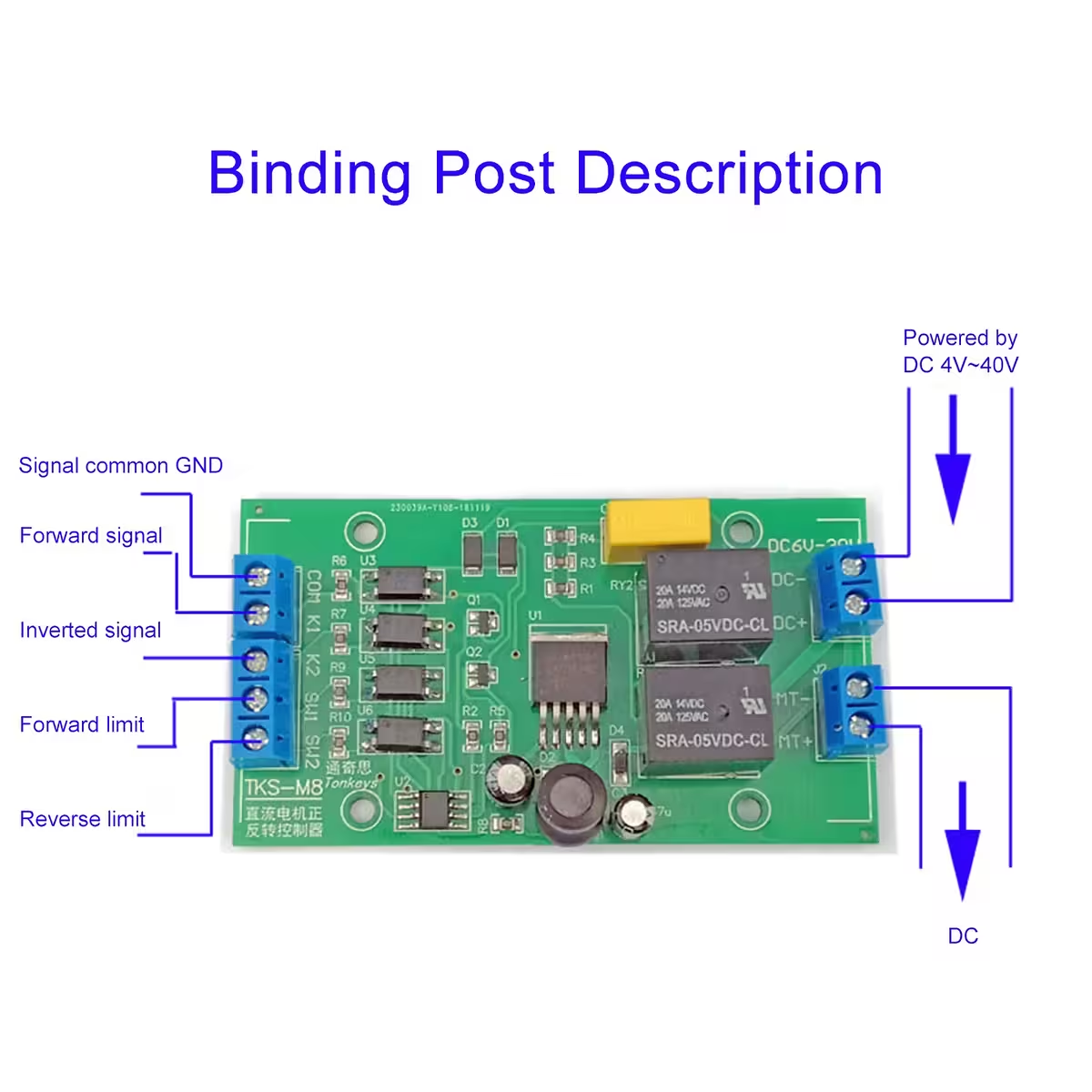
- Universelle active-low indgange — tilslut direkte simple trykknapper, mekaniske NO-endestop eller 3-tråds NPN-sensorer uden ekstra modstande.
- Integrerede endestop SW1/SW2 — automatisk stop ved endeposition forhindrer mekanisk blokering eller overbelastning.
- Lang levetid >150.000 aktiveringer — driftssikkerhed til daglig brug.
- Lavt egetforbrug: 0,6W aktiv / 0,1W standby — skåner batteriet, når systemet er i dvale.
Detaljer og ydeevne
Controlleren benytter en active-low arkitektur: En indgang aktiveres, når spændingen falder til under 2V. Det betyder, at simple trykknapper, NO (normal-open) mekaniske endestop og NPN-NO 3-tråds sensorer kan tilsluttes direkte uden ekstra komponenter.
Responstiden er ≈20ms for K1/K2-kommandoer og ≈50ms for SW1/SW2-endestop — hurtigt nok til dynamiske applikationer, men stabilt nok til at undgå fejlaktiveringer.
Ved højere spændinger anbefales det at begrænse strømstyrken: Ved 12V kan du trække op til 20A, mens det ved 24V anbefales at begrænse til ca. 10A for optimal termisk drift. Brug altid en passende sikring og kabler dimensioneret til belastningen.
| Parameter | Værdi / Detalje |
|---|---|
| Driftsspænding | DC 4–40V (anbefalet 6–36V) |
| Maks. udgangsstrøm | op til 20A (ved 12V) |
| Anbefalet motoreffekt | op til ca. 80W |
| Modulforbrug (aktiv) | ca. 0,6W |
| Modulforbrug (standby) | ca. 0,1W |
| Indgangssignal | Active-low (aktiv ved spænding < 2V) |
| Responstid K1/K2 | ≈ 20ms |
| Responstid SW1/SW2 | ≈ 50ms |
| Driftstilstande | PO (selvhold) / P1 (jog) |
| Levetid | >150.000 aktiveringer |
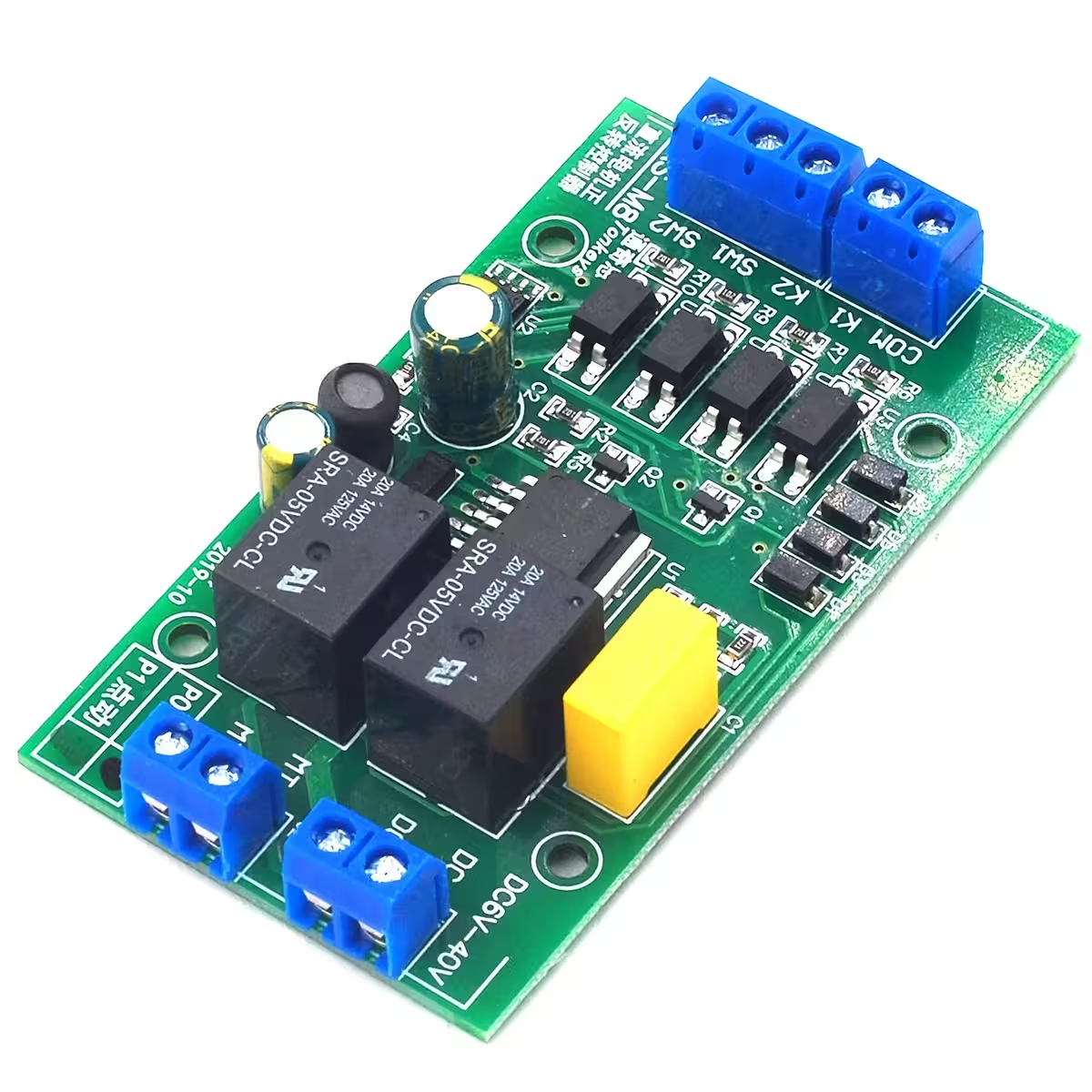
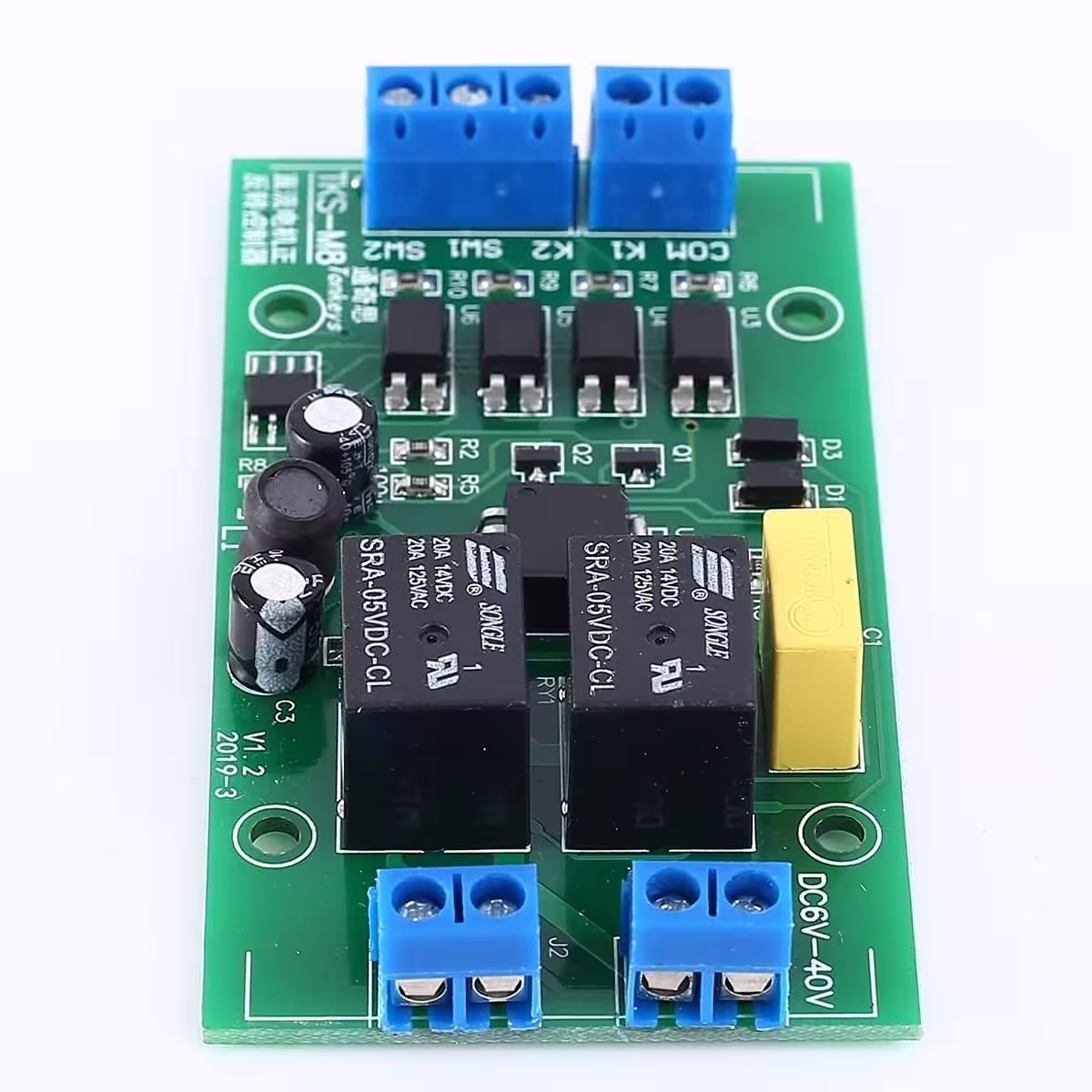
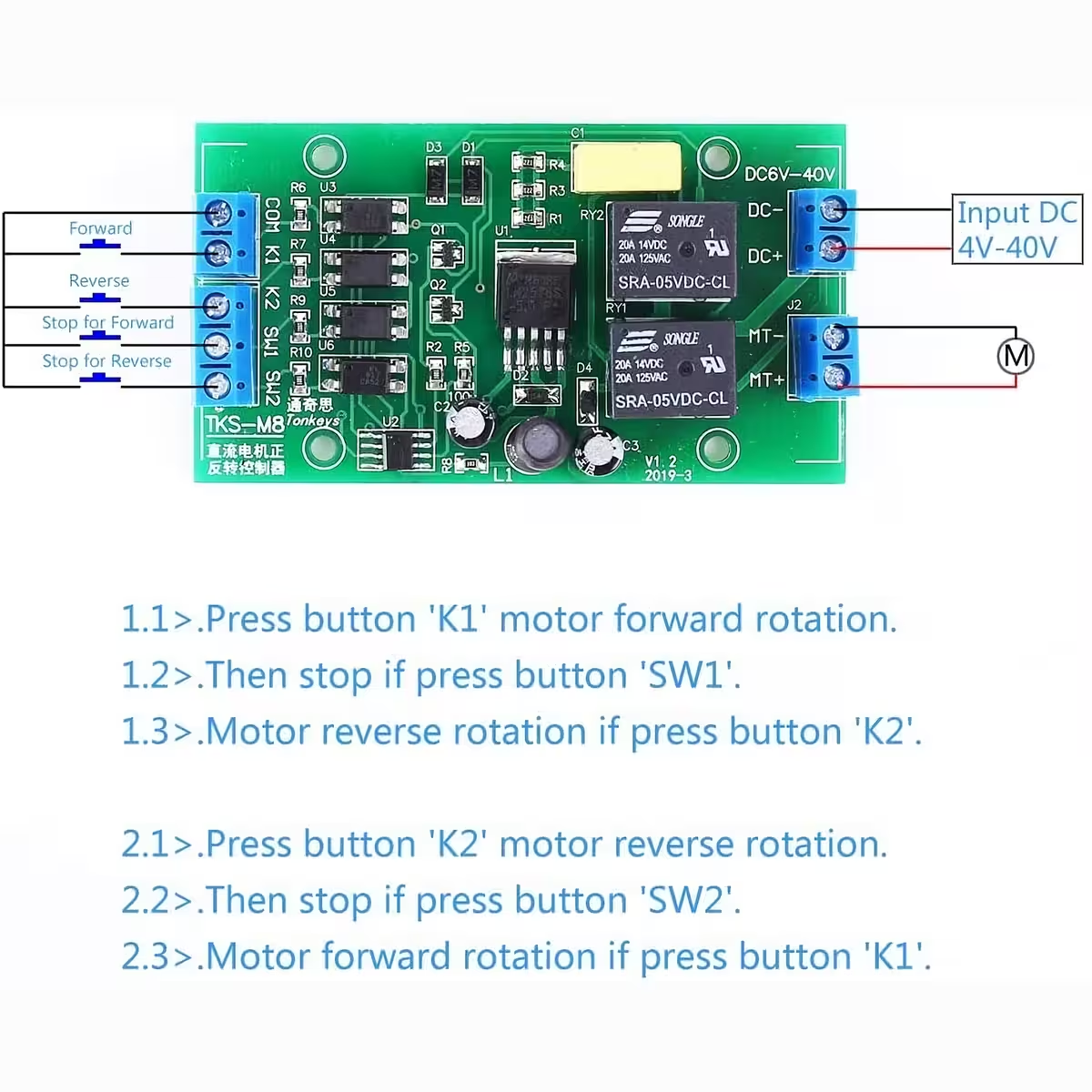
| Indgang K1 | Frem-kommando (active-low) |
| Indgang K2 | Bak-kommando (active-low) |
| SW1 | Endestop frem (NO anbefales) |
| SW2 | Endestop bak (NO anbefales) |
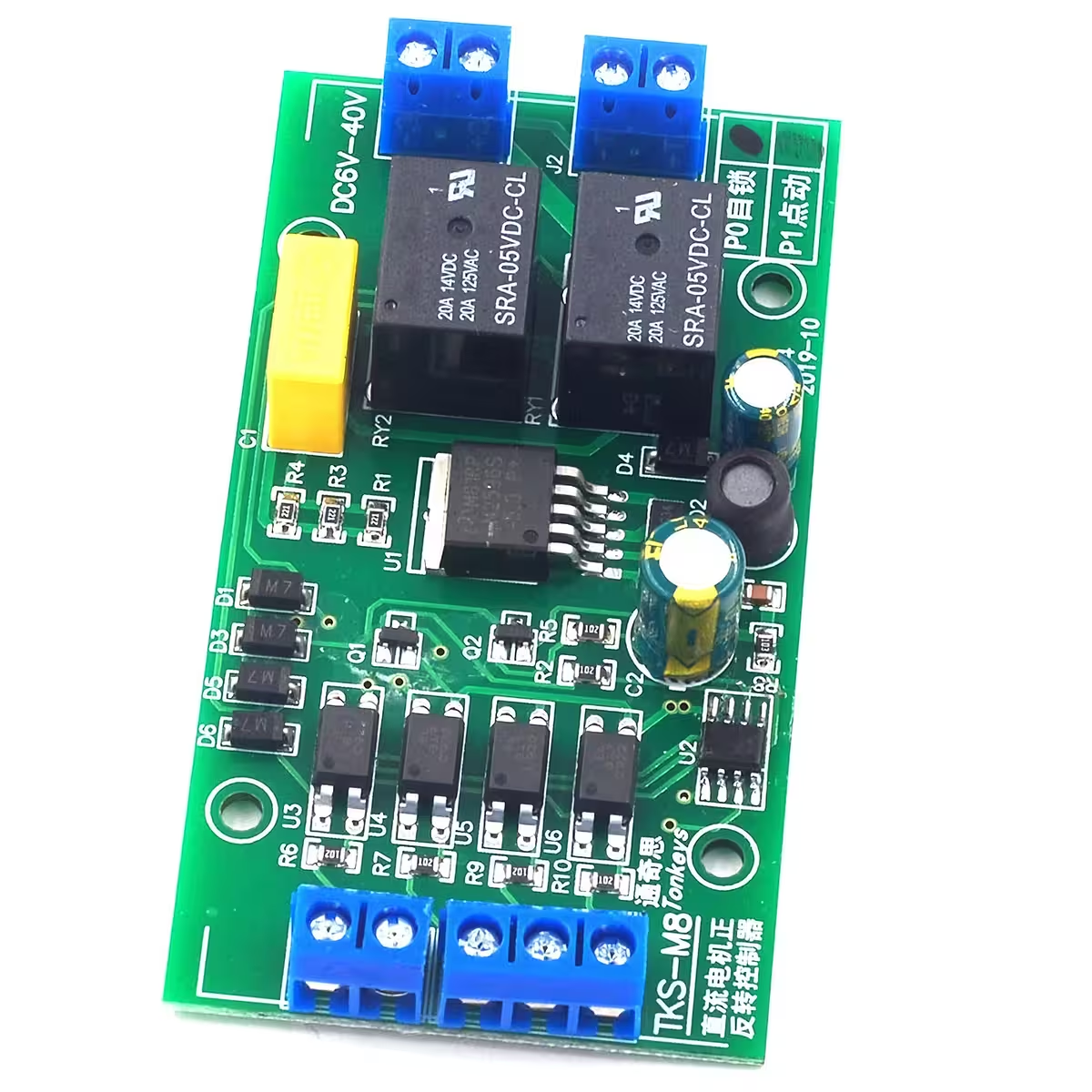
| VIN+ / VIN- | DC strømforsyning 4–40V |
| Motor+ / Motor- | Udgang til DC-motor |
Programmering og brug
PO-tilstand (Selvhold): En kort impuls på K1 eller K2 starter motoren. Den kører herefter automatisk, indtil det tilhørende endestop aktiveres, eller en modsat kommando gives. Ideelt til automatisering.
P1-tilstand (Jog): Motoren kører kun, så længe K1 eller K2 holdes aktiveret. Ideelt til finjustering og manuel positionering.
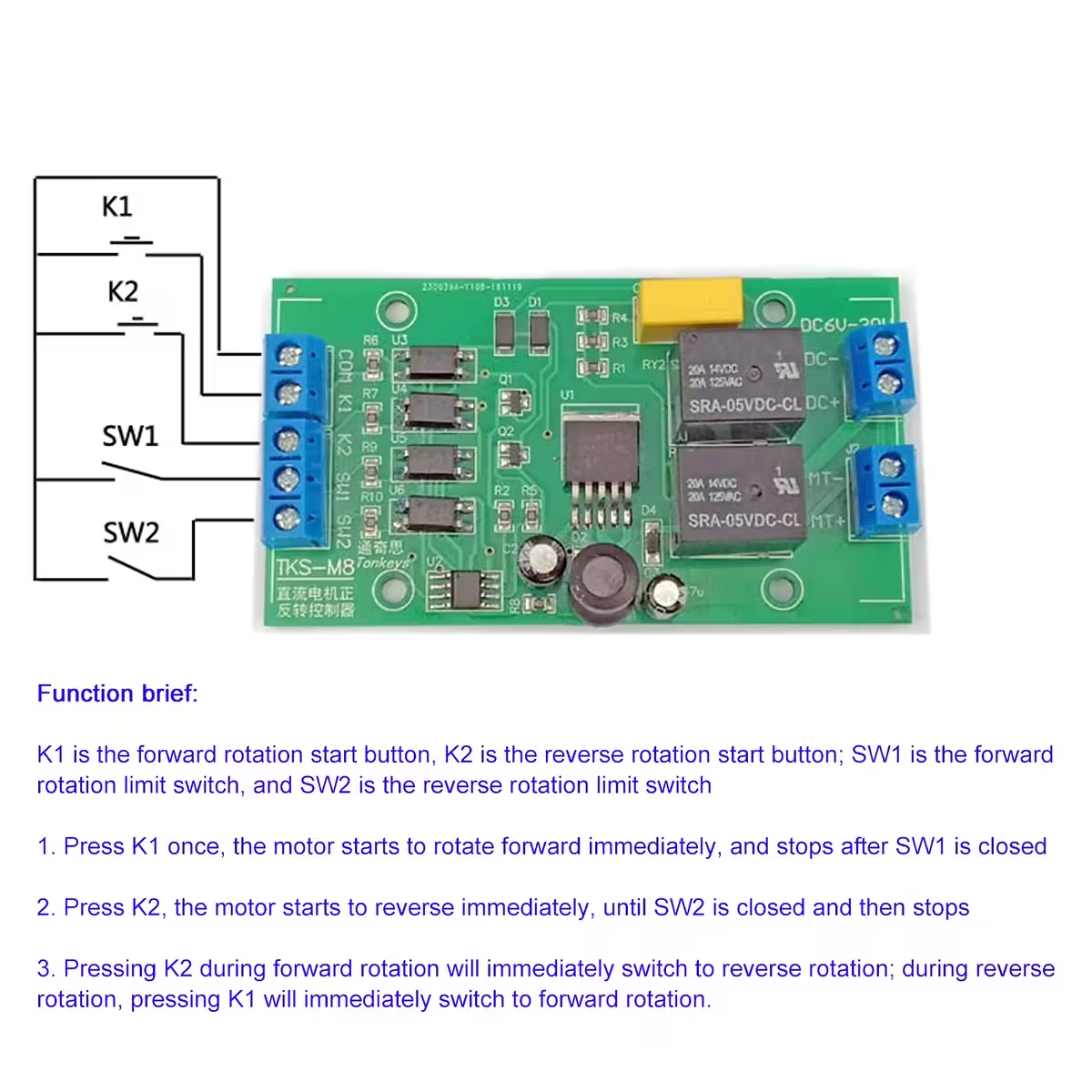
- Tilslut strømforsyningen til VIN+ og VIN– (overhold polariteten).
- Tilslut DC-motoren til Motor+ og Motor–.
- Vælg driftstilstand: PO for selvhold eller P1 for jog.
- Tilslut trykknapper eller styresignaler til K1 (frem) og K2 (bak) — active-low indgange.
- Tilslut eventuelle mekaniske endestop eller NPN-NO sensorer til SW1 og SW2.
- For automatisk cyklisk bevægelse A→B→A: Forbind NO-kontakter fra position A til K1 og fra position B til K2, og lad SW1/SW2 være uforbundne.
- For Arduino-integration: Forbind Arduino GND til controller GND, og brug to digitale pins til K1 og K2. Sæt pins som OUTPUT og skriv LOW for at aktivere.
- Kontrollér motorens startstrøm og monter en passende sikring på forsyningslinjen.
Pakkens indhold
- 1 × DC motor controller (Frem/Bak), PO/P1-tilstande
Ofte stillede spørgsmål
Hvad betyder active-low?
Indgangen aktiveres, når spændingen falder til under 2V — altså når den forbindes til stel (GND). Simple trykknapper, NO-endestop og NPN-sensorer fungerer præcis sådan. Du behøver ikke ekstra modstande eller inverterende logik.
Hvad er forskellen på PO og P1?
I PO-tilstand starter en kort impuls motoren, som kører indtil et endestop nås eller en modsat kommando gives. I P1-tilstand kører motoren kun, så længe knappen holdes nede – perfekt til manuel præcisionsstyring.
Kan jeg forbinde controlleren direkte til Arduino?
Ja. Forbind Arduino GND til controllerens GND og brug to digitale pins sat som OUTPUT. Når pinden er LOW, er kommandoen aktiv. Arduinoen styrer logikken, mens controlleren håndterer strømmen.
Kan jeg bruge NC (normal-lukket) endestop?
Controlleren er optimeret til NO (normal-åben) endestop. NC-kontakter vil invertere logikken og kan skabe uønsket adfærd. Brug altid NO-kontakter til SW1 og SW2.
Er køleplade nødvendig ved maks. strøm?
Ved strømstyrker tæt på 20A eller ved intensiv brug anbefales god ventilation. Ved kontinuerlig drift under høj belastning kan en lille køleplade eller aktiv køling forlænge levetiden markant.
Hvordan laver jeg automatisk cyklisk bevægelse?
Forbind NO-kontakter fra position A til K1 og position B til K2, og lad SW1/SW2 være uforbundne. Når motoren rammer et endepunkt, aktiverer kontakten automatisk den modsatte retning, så motoren kører frem og tilbage kontinuerligt.
Produktvideo
Galleri











Anmeldelser
Der er endnu ikke nogle anmeldelser.